Cobot — Proxie Gen2


I am Shane Deng.
I bring robots to life! My primary interest is to integrate and prototype complex robotic systems.
I have worked on a variety of robotic systems, from small-scale research projects to large-scale production systems.
I was previously working on my PhD at Northwestern University, where I was
part of the Center for Robotics and Biosystems. I decided to transition to industry to apply my
knowledge and skills to solving real-world problems.
By the way, if you haven't seen Westworld, you should! It is my favorite show of all time.
Collaborative Robotics
Robotics Integration Engineer — –
Robotics integration engineer delivering end-to-end platform work—from sensor and motor bring-up through ROS2-based autonomy improvements, field debugging, and cross-team hardware–software validation—so deployed robots stay reliable in real environments.
Center for Robotics and Biosystems
Robotics Research Assistant — –
Pioneered the world's first fully autonomous robotic construction pipeline, integrating perception, automatic parametric design, on-site manufacturing, and assembly, validated by having the system autonomously locate, design, and build missing miniature train tracks in experiments spanning several days. (Publication under review)
Robomechanics Lab — Carnegie Mellon University
Graduate Research Assistant — Pittsburgh, Pennsylvania — –

BADGER Lab — University of Wisconsin–Madison
Undergraduate Research Assistant — Madison, Wisconsin — –

Enerpac Tool Group
New Product Development Engineering Co-op — Columbus, Wisconsin — –

Thermo Fisher Scientific
Engineering Intern — Fitchburg, Wisconsin — –
Cobot — Proxie Gen2
A Fully Automated Construction
Environmental Monitoring Platform

Inverted Pendulum — Torsobot
Advanced Mechatronics & Embedded Systems
Expanding Lattice Robot Simulation
Game Development — 3D Shooting
Hackathon — Automated GO Board
Motion Planning & Path Planning

Internships — Thermo Fisher & Enerpac
Robot Learning & Machine Learning
Controller Design and Simulation

Engineering Entrepreneurship

Leadership and Teaching

Resident Assistant

Student Today Leader Forever

Volunteering

Adventures

Engineering Projects
Northwestern University
Ph.D. in Mechanical Engineering — Robotics (incomplete)
Advisor: Prof. Michael Rubenstein · GPA: 3.9/4.0
Leadership & teaching
Awards
Carnegie Mellon University
Master of Science in Mechanical Engineering — Research
Advisor: Prof. Aaron Johnson · GPA: 4.0/4.0
Leadership & teaching
University of Wisconsin–Madison
Bachelor of Science in Mechanical Engineering with Distinction
Advisor: Prof. Peter Adamczyk · GPA: 3.9/4.0
Leadership & teaching
Awards
Selected work; see Professional Projects for context and media.
Cobot — Proxie Gen2



My primary focus at Cobot is to design and integrate the second generation of the Proxie robot (not released yet). I work across multidisciplinary functions including hardware/software integration, sensor and motor bring-up and calibration, software and test development, system debugging and analysis, new product development, and EtherCAT.
Role
Integrate sensors, actuators, and software to enable the physical intelligence of the next Proxie platform.
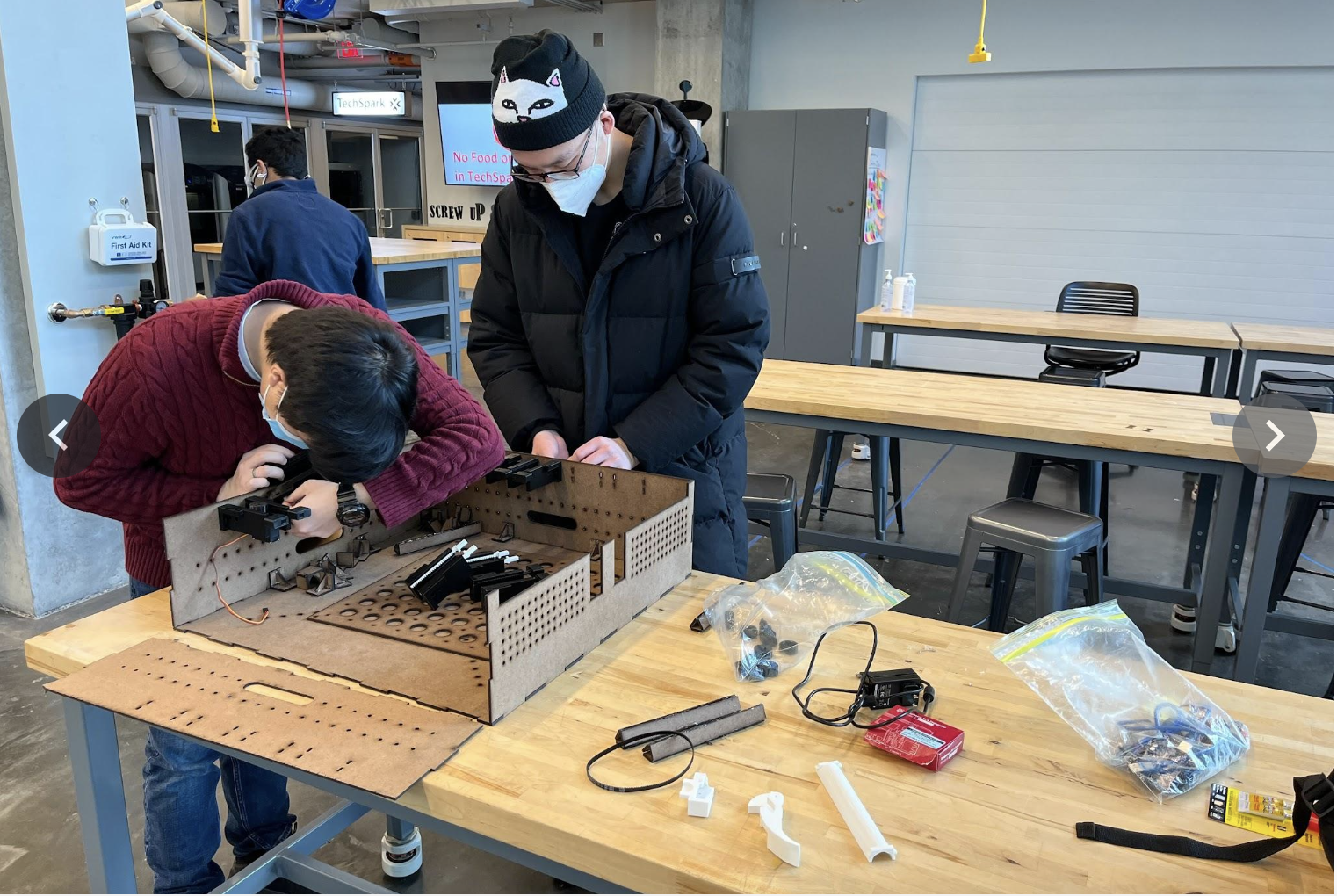
A Fully Automated Construction
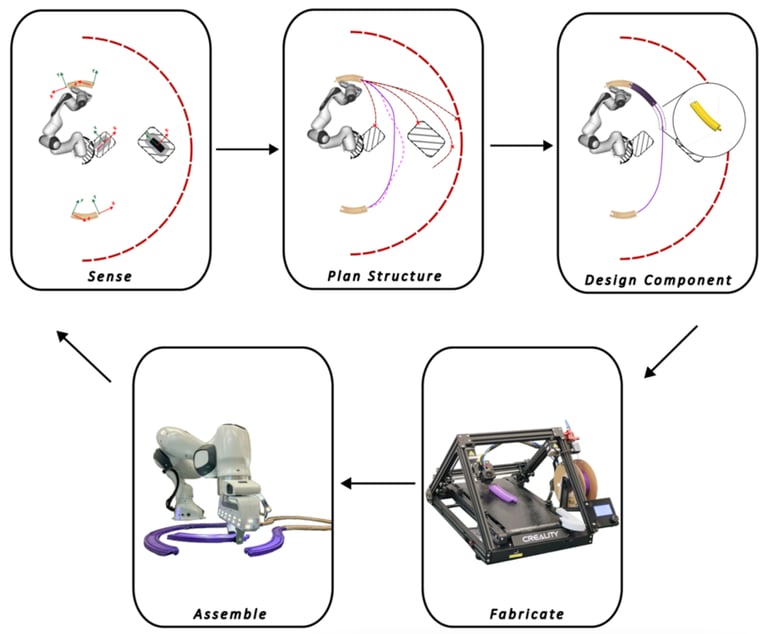
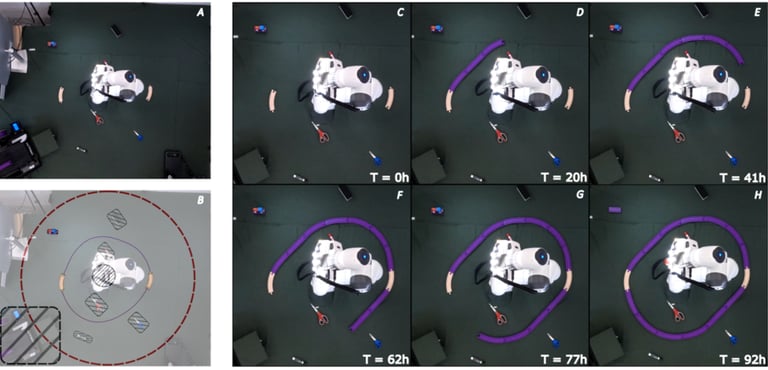
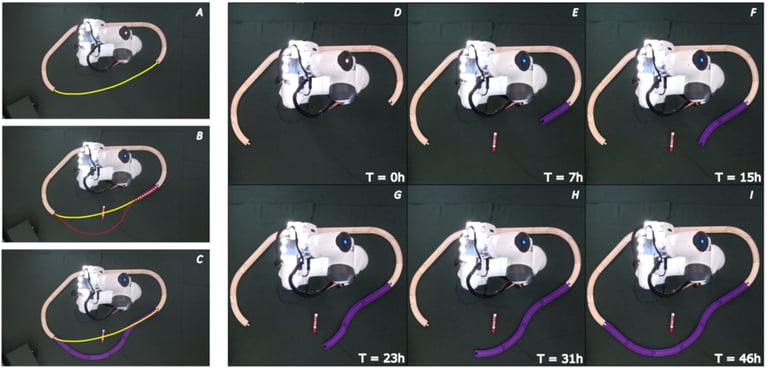
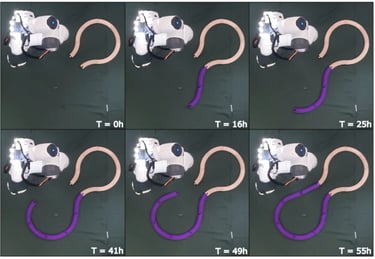
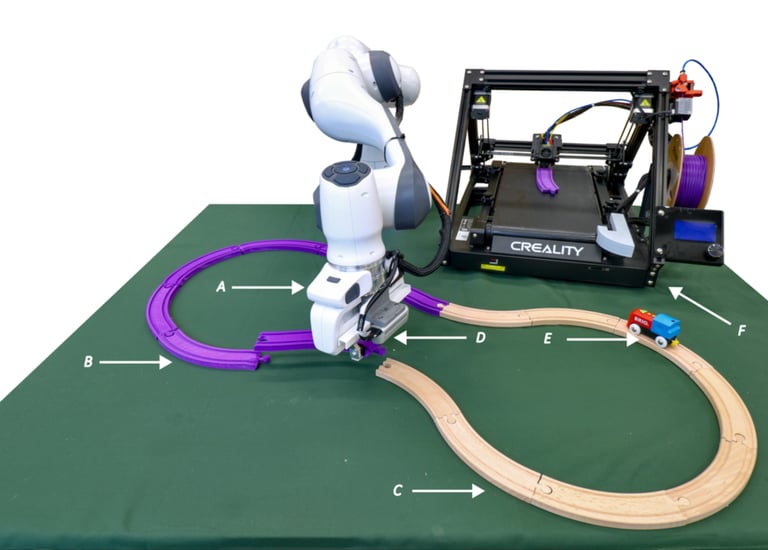
We designed the world first construction system that is capable of automatically designing, manufacturing and assembling the train tracks, derived from the commercial Brio train tracks.
Deng S, Cao S, Elwin M, Rubenstein M. Automated Construction: An Integrated Pipeline for Environment-Adaptive Design, Fabrication, and Assembly with Constraints (pending publication)
The goal is that the construction robotic system can autonomously sense all the existing tracks and obstacles, generate custom train track pieces that satisfy constraints such as curvature constraints, manufacture the desired track piece with a 3D printer, and finally place the fabricated train track piece in the corresponding location in the environment. The process is repeated until all the track pieces are connected to form a loop track. To further verify the successful construction of the train track loop, the robot places the original Brio train on the track and the train should drive on the loop track without derailment.
The following components make the system possible to automate the entire train track construction process fully:
Environmental Monitoring Platform
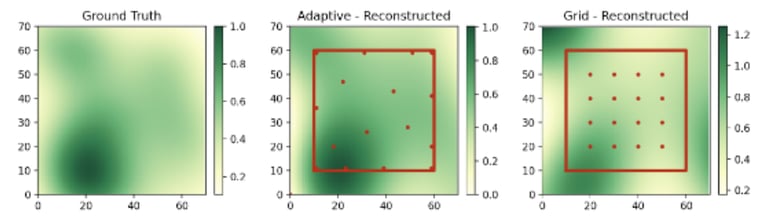

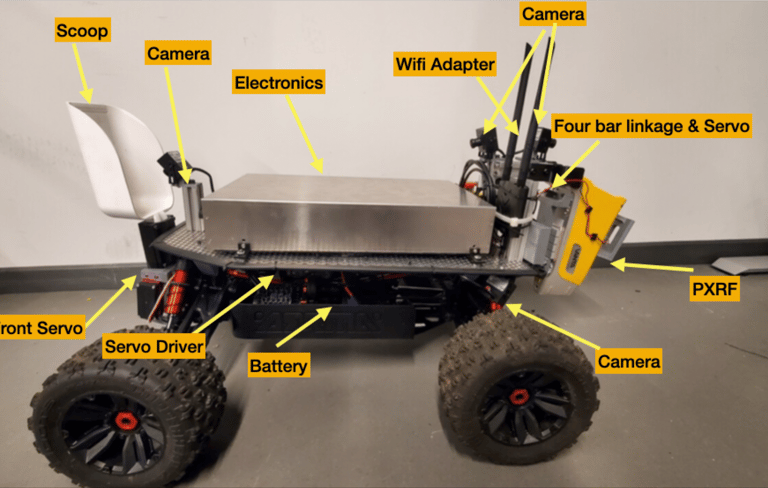


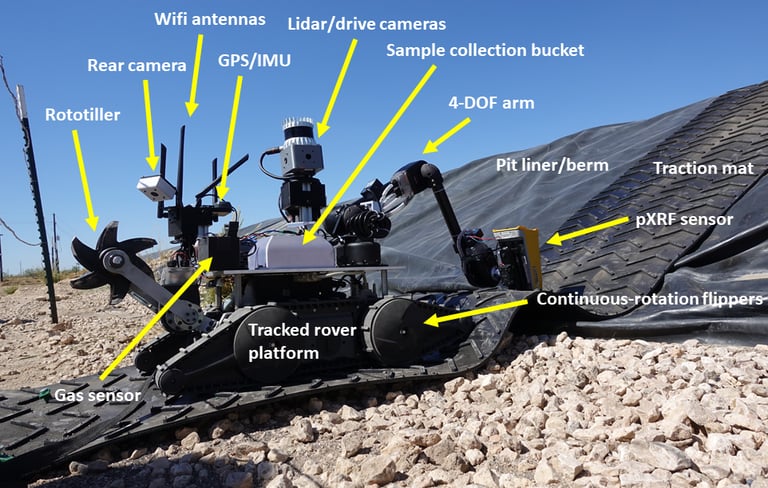
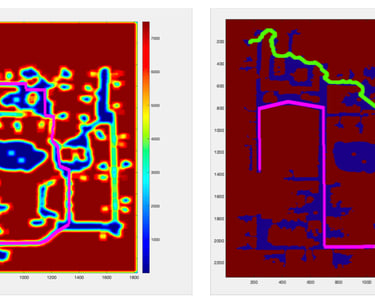
The goal is to design a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments. The main challenge is to integrate all the subsystems together into a complete robotic package that satisfies the mission requirements.
HEBI Bot is a high-end environment monitoring and mitigation platform that we developed at Robomechanics Lab in collaboration with HEBI Robotics and a top US energy company.
The system is equipped with:
S. Deng, S. Wang, H. Wang, I. Krause, N. Sihota, T. Hoelen, G. V. Lowry, and A. M. Johnson, “Autonomous efficient soil sampling with a ground-based robotic system,” Master’s thesis.
Vivek Thangavelu, Hairong Wang, Shane Deng, Sean Wang, Ian Krause, Thomas Hoelen, Gregory V. Lowry, Aaron M. Johnson, “Efficient Autonomous Soil Characterization with a Ground-Based Robotic System,” in preparation for submission to Journal of Field Robotics.
Joe Norby, Sean Wang, Hairong Wang, Shane Deng, Nick Jones, Akshit Mishra, Catherine Pavlov, Hannah He, Sathya Subramanian, Vivek Thangavelu, Natasha Sihota, Thomas Hoelen, Aaron M. Johnson, Gregory V. Lowry, “Path to Autonomous Soil Sampling and Analysis by Ground-based Robots,” Journal of Environmental Management.
The algorithm is developed to be a more efficient way of taking samples in an unknown environment. The algorithm is implemented in Python with the scikit-learn machine learning library. The performance of the adaptive sampling algorithm is compared with the Boustrophedon algorithm and the performance graphs are generated with the MATLAB Python library. To ensure the fairness of comparison, both adaptive and Boustrophedon algorithms use the same underlying Gaussian Process settings. To compare the accuracy of the reconstruction, the Wasserstein distance is used. The Wasserstein distance is also known as Earth Mover’s Distance (EMD).
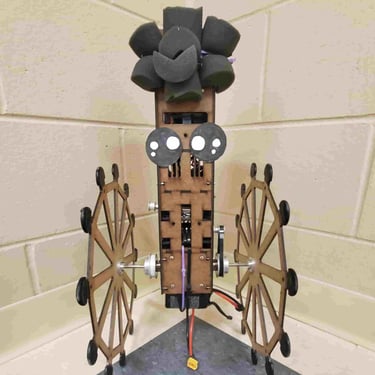
Inverted Pendulum — Torsobot


Torsobot was the discrete wheeled platform I developed mainly to study different walking gaits at the Biomechatronics, Assistive Devices, Gait Engineering, and Rehabilitation Laboratory at the University of Wisconsin–Madison.
The system is equipped with:
Here is our lab video that featured the robot I developed: YouTube (also the first slide in the carousel above).
You can read more about the project on the BADGER lab research page.
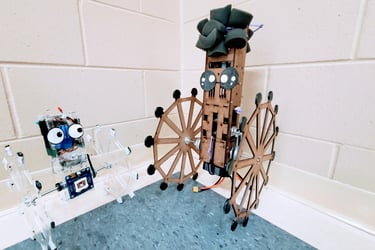
Advanced Mechatronics & Embedded Systems

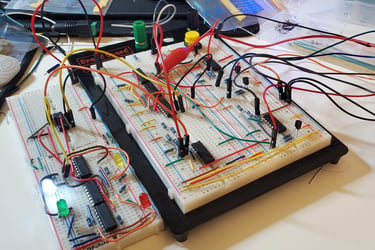
Gummy Bear Detector
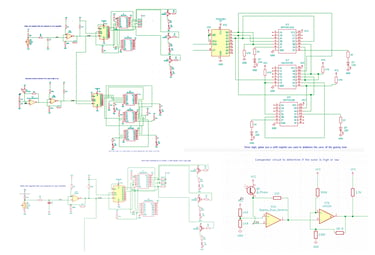
The analog circuit uses fundamental elements such as op-amps, resistors, and shift registers. The detector identifies gummy-bear color with simple spectroscopy: three colored LEDs shine through the sample and a phototransistor measures light passthrough. A comparator stage filters the signal and drives indicator LEDs for up to four colors: red, green, white, and yellow.
Down the Clown
A replica of the classic arcade game built on the STM32F4 with hand-designed circuits—no HAL libraries; peripherals are configured by writing register bits. The GUI is implemented in Processing (Java).
Expanding Lattice Robot Simulation
We design simple robots that can move in any direction on a lattice; each unit is driven by a single actuator. The work studies collective behavior in simulation and develops algorithms to control the swarm.
The simulator is a testbed for control strategies, algorithms, and mechanical concepts in both 2D and 3D.
Tools
Game Development — 3D Shooting
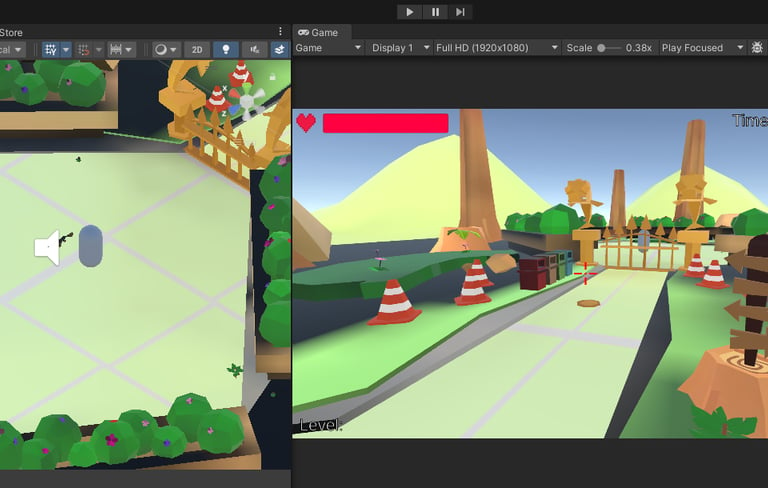
A 3D survival first-person shooter built in Unity with game-controller input. The player survives six waves of increasing difficulty.
Player actions
Shoot, jump, move, and reload.
Enemies
Spawn randomly, chase the player, deal damage, and can jump between platforms.
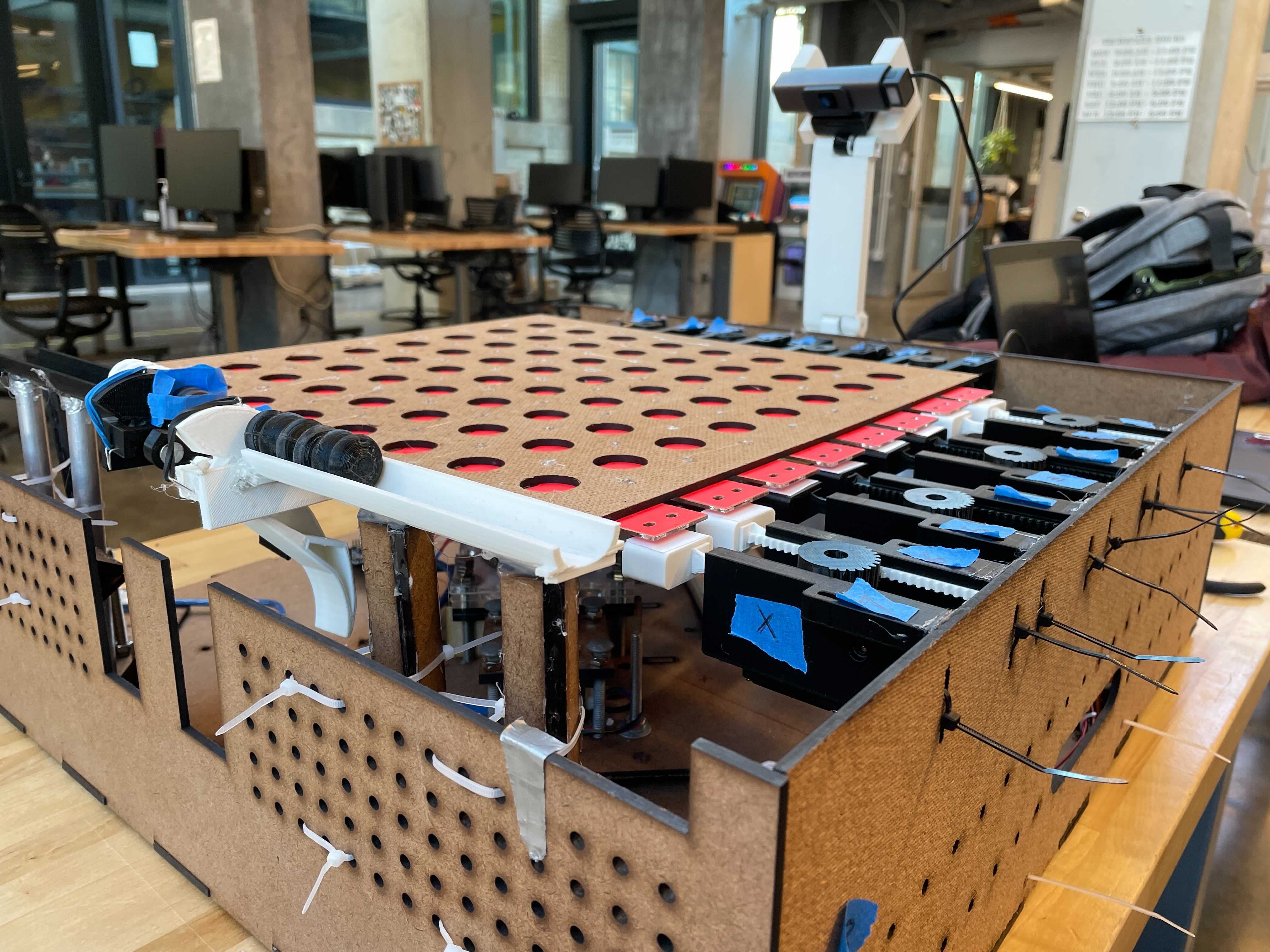
Hackathon — Automated GO Board (Build 18)




Built for Build 18 at Carnegie Mellon: an automated GO board inspired by the classic game, combining mechanical design, sensing, and game logic.
Highlights
Awards
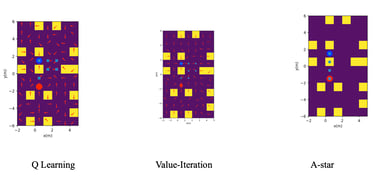
Motion Planning & Path Planning
7-DoF arm planning
Given start and goal poses with obstacles, the arm is planned with algorithms implemented from scratch:
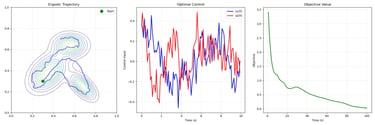
2D pursuit planning
The pursuer minimizes time-to-capture against a known agent trajectory on a known map using:
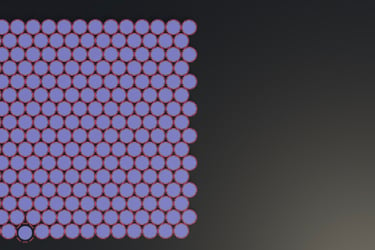
Big Brain Pac-Man
An OpenGL Pac-Man base extended with our planners. LRTA* runs on Pac-Man in a partially observed world: the green dot is a randomly spawned pellet; the red/orange ring is Pac-Man’s vision. Experiments vary ghost count (1–3), ghost policies (A* vs default), and vision radius.
Internships — Thermo Fisher Scientific & Enerpac




Thermo Fisher Scientific
Led the intern team that designed and integrated a multi-color status light bar into the Nicolet Summit FTIR Pro spectrometer (launched commercially in 2019). Recognized for failure analysis and software testing.
Full video of the feature on YouTube
Enerpac Tool Group
New product development co-op on the E-Pulse line during launch: verification testing, failure analysis, and future-capability work. Identified and resolved a critical controller-board issue before release.
Robot Learning & Machine Learning
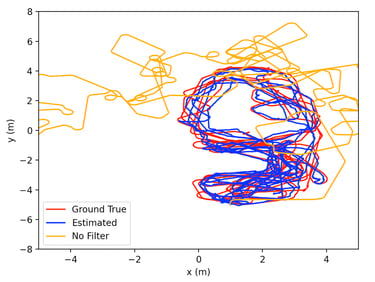
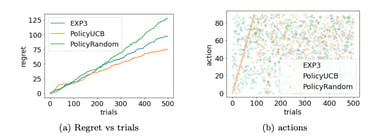
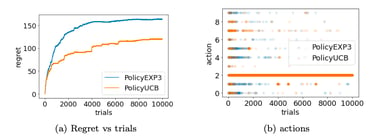
Implementations of learning, filtering, and estimation for coursework and projects in simulation and on real-world datasets.
Areas
Controller Design and simulation

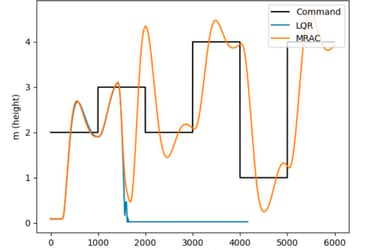
Control laws implemented and evaluated in simulation environments such as Webots.
Controllers
Engineering Entrepreneurship


During my time at Carnegie Mellon University, I became deeply involved in entrepreneurship—ranging from startup classes to participating in venture business competitions.
One of our class projects spun off into something bigger: Sensify Inc. We completed the Ascender Incubator Program in Pittsburgh and are now initiating our pilot study with the Pittsburgh International Airport.
Venturecat 2025: Finalist & First Place in Sustainability and Energy. Read the results.
Read more about Sensify: sensifyrecycling.com.
Leadership and Teaching


Throughout my undergraduate and graduate studies, I was heavily engaged in mentorship programs—coaching other students on succeeding in academics and life.
Leadership & teaching
Resident Assistant


During my junior year, I applied to be a house fellow (Resident Assistant, RA). After interviews, I was honored to be selected as the House Fellow for the Sullivan Residence Hall.
Throughout the year, I managed around 70 students, planned events, performed duty rounds, and promoted inclusivity in the community.
Student Today Leader Forever
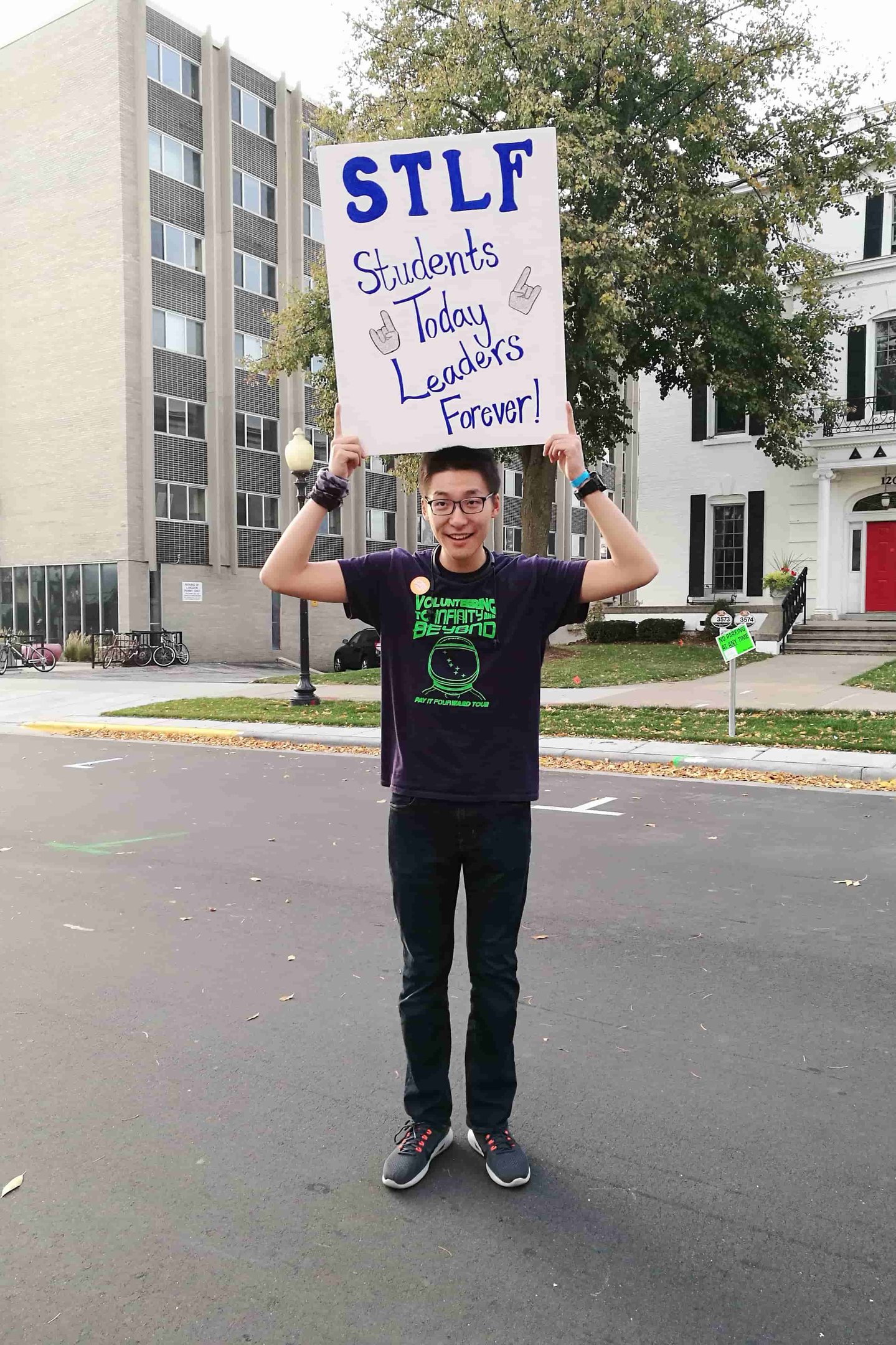



Student Today Leader Forever was a national organization with university chapters across the nation. The main goal was to support communities that needed help. One of the flagship programs was Pay It Forward Trip—a 9-day spring break volunteering trip across multiple states.
During my two-and-a-half-year involvement, I served as both a participant and leader in the UW-Madison STLF Chapter.
Volunteering


Outside of school, I engaged with the community through volunteering projects.
I volunteered with organizations such as Urban League (STEM tutor) and Volunteering Solutions (international volunteer in Thailand).
More recently, I joined the Pre-Scientist Pen Pal program to help more people learn about STEM.
Adventures



Life’s too short to play it safe—I dive headfirst into new adventures, push boundaries, and soak up every experience I can.
I enjoy
I’ve also started social media channels such as YouTube, Bilibili, and Rednote. One of the highest viewed videos reached over 110K views.
Engineering projects

Throughout college, I was heavily involved in engineering organizations and various competitions such as Wisconsin Robotics, Hyperloop Challenge, and Baja SAE, working at the intersection of hardware and software.