Project
Motion Planning
Collaborators: Big Brain PacMan (Aneesh Pawar, Aris Faria Chavez, Taylor Kyle), motion planning (None)
Big Brain Pacman
The game was originally developed in OpenGL. We used the game as the foundation and integrated our algorithms with the game. In this game, we deployed the LRTA* algorithm on the PacMan.
In the demo, the green dot is the bean generated randomly on the map. The red/orange circle around the PacMan is the vision of the PacMan. PacMan doesn't know where the ghosts are or the map layout. This is planning in partially observed environment.
We tested the algorithm in different settings:
Different number of ghosts (1 -3)
Different ghost algorithms (A*, default)
Different PacMan vision radius

Motion Planning
7 DoF arm planning: This 2D arm has 7 DoF. The goal pose and start pose are given. I have implemented the following planners from scratch to allow the arm to go around the obstacles to reach the goal pose.
Probabilistic Road Map
RRT*, RRT-Connect, RRT
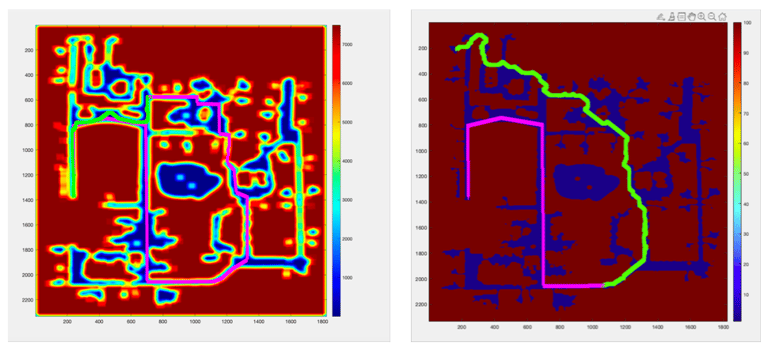
2D pursuit planning: The goal is to plan and catch the agent as fast as possible. The red trajectory is the trajectory of the agent. The green trajectory is the pursuer's trajectory. The agent trajectory is known and the map is given. The following planners are used:
3D A* (x,y,t)
3D Backward A* with 2D forward A* (better heuristic)