Project
Autonomous Construction Robot
Collaborators: Shantao Cao (https://rhit-caos1.github.io/Final_Track_Builder/)
A fully automated construction
We designed the world first construction system that is capable of automatically designing, manufacturing and assembling the train tracks, derived from the commercial Brio train tracks.
Deng S, Cao S, Elwin M, Rubenstein M. Automated Construction: An Integrated Pipeline for Environment-Adaptive Design, Fabrication, and Assembly with Constraints.
Project Overall
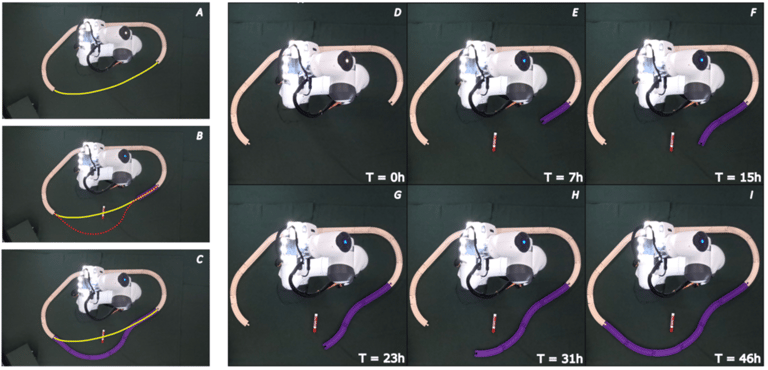
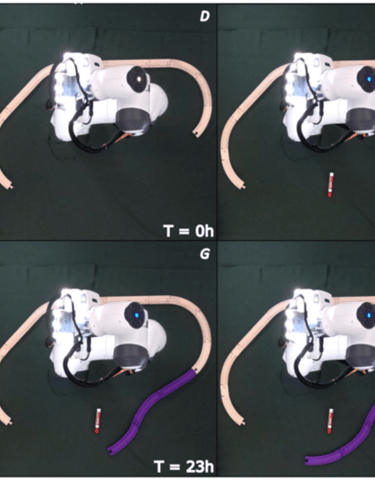
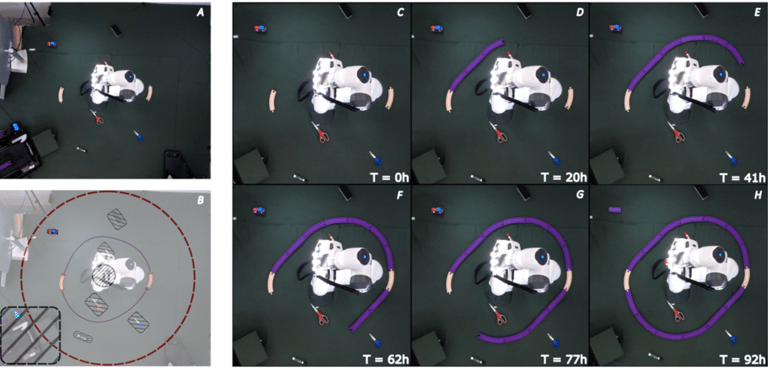
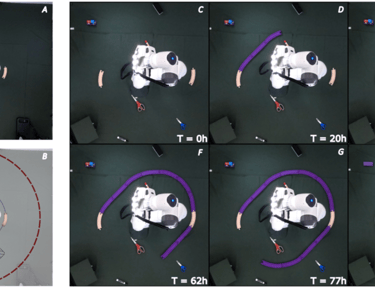
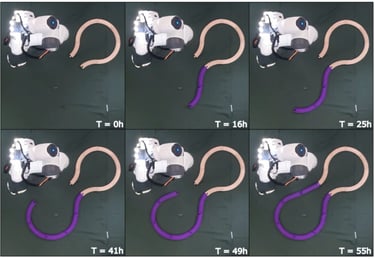
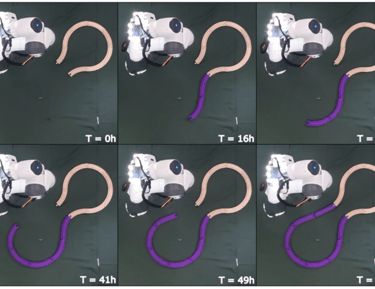
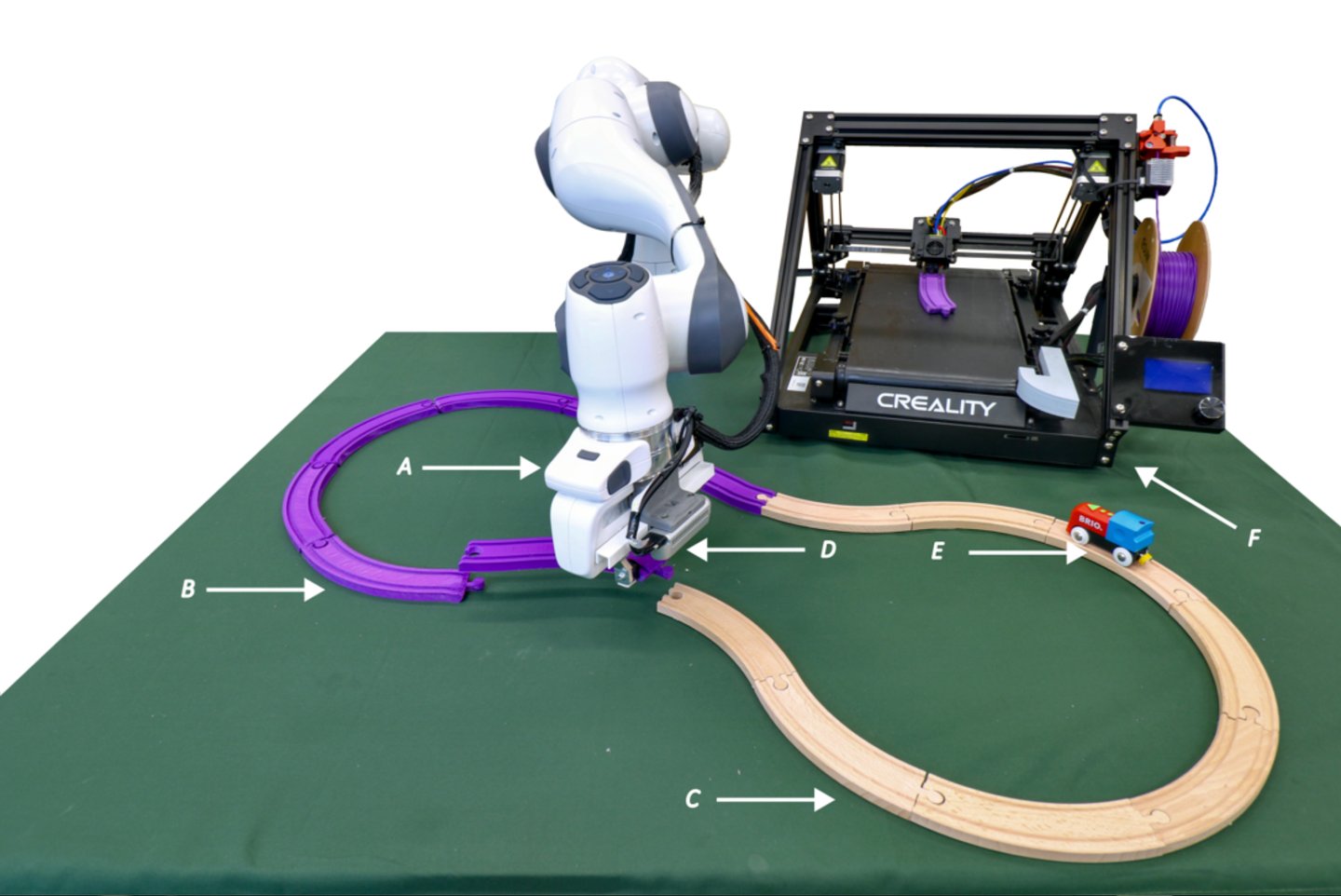
The goal is that the construction robotic system can autonomously sense all the existing tracks and obstacles, generate custom train track pieces that satisfy constraints such as curvature constraints, manufacture the desired track piece with a 3D printer, and finally place the fabricated train track piece in the corresponding location in the environment . The process is repeated until all the track pieces are connected to form a loop track. To further verify the successful construction of the train track loop, the robot places the original Brio train on the track and the train should drive on the loop track without derailment.
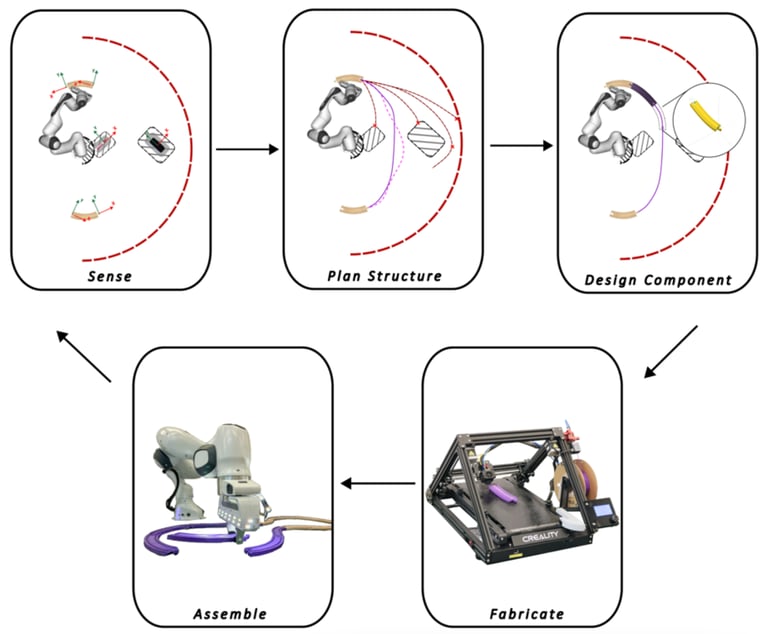
Key System Implementation:
the following components make the system possible to automate the entire train track construction process fully:
Scanning: Computer vision system to distinguish and locate existing train tracks in the environment and obstacles
Design: The planner with constraints (such as minimal curvature constraint) solves and finds the sub-optimal path.
CAD Generator: Convert the sub-optimal path into CAD files, slice the CAD file into printable files, upload it to the printer, and initiate the print automatically
Fault Detection: in case of failure (such as the print fails), the system attempts to recover and resume the construction
Assembly: The robotic arm grasps the printed part and places it in the corresponding locations.