Project
Expanding Lattice Robot Simulation
Collaborators: Jingxian Wang, Vaishnavi Dornadula, Annagrace Hamson
Expanding Robot
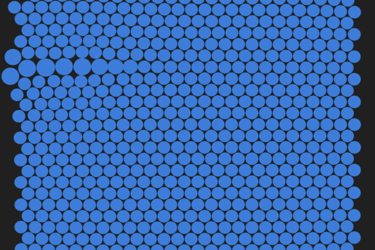
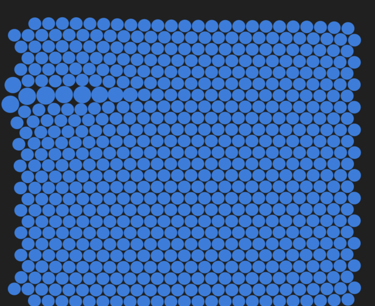
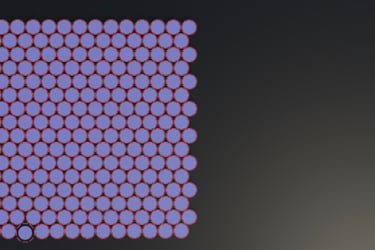
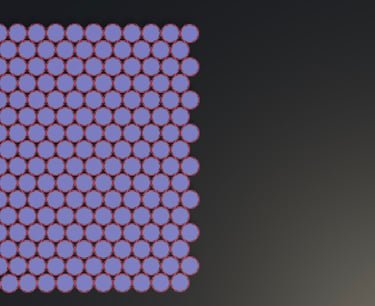
We are trying to design simplistic robots that can move in any direction in a lattice structure. Each robot is driven by a single actuator. We want to understand the collective behavior in simulation and develop algorithms that can control them.
The simulation platform serves a test bed to iterate the control strategies and algorithms as well as the physical design of the robots
The simulation has been developed both in 2D and 3D. The following simulation tools have been used:
MuJoCo
Box2D
Unity
Taichi (GPU accelerated)