Project
Environmental Monitoring Platform
Collaborators: Sean Wang, Ian Krause, Hairong Wang
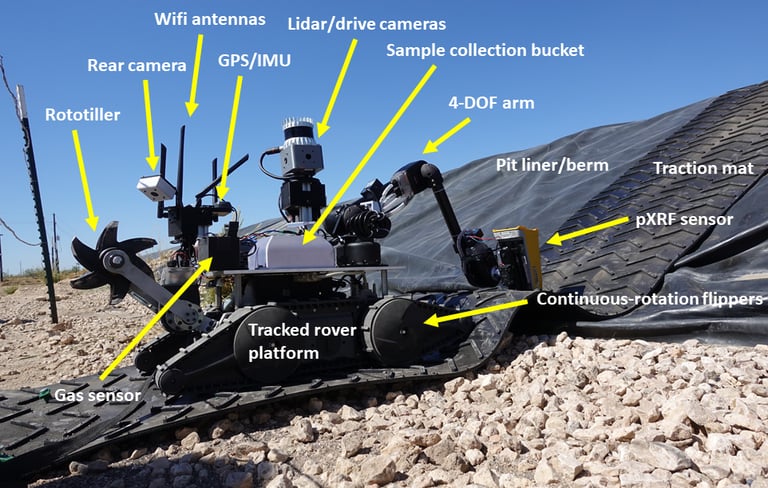
Meet HEBI Bot
The goal is to design a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments. The main challenge is to integrate all the subsystems together into a complete robotic package that satisfies the mission requirements.
HEBI Bot is a high-end environment monitoring and mitigation platform that we developed at Robomechanics Lab in collaboration with HEBI Robotics and a top US energy company.
The system is equipped with
HEBI motors for actuation and mobility
Velodyne Lidar for mapping and navigation
Cameras for teleoperation
PXRF sensor for contamination detection
GPS module for localization
S. Deng, S. Wang, H. Wang, I. Krause, N. Sihota, T. Hoelen, G. V. Lowry, and A. M. Johnson, "Autonomous efficient soil sampling with a ground-based robotic system," Master Thesis
Vivek Thangavelu, Hairong Wang, Shane Deng, Sean Wang, Ian Krause, Thomas Hoelen, Gregory V. Lowry,
Aaron M. Johnson, "Efficient Autonomous Soil Characterization
with a Ground-Based Robotic System", in preparation for submission to Journal of Field Robotics





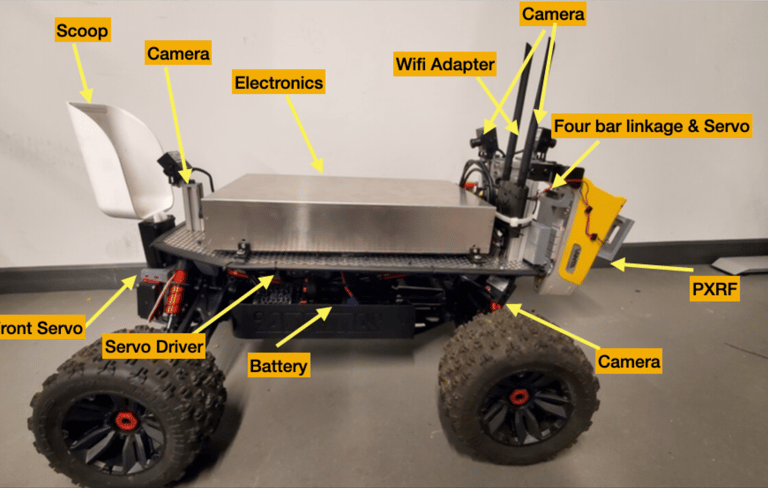
Meet CESAR & Patrick
CESAR is the low-cost adaptive sampling platform that I developed from scratch. All the components are purchased from third-party suppliers, totaling about 2000 USD. The platform serves as a proof of concept. The platform and the adaptive sampling algorithm were deployed and tested in a remote industrial site in Texas.
Patrick is the previous platform that I briefly worked on before I developed the CESAR platform. Patrick is a comprehensive system with all the advanced features. The only drawback is mobility which led to the development of CESAR, a much faster platform.
Joe Norby, Sean Wang, Hairong Wang, Shane Deng, Nick Jones, Akshit Mishra, Catherine Pavlov, Hannah He, Sathya Subramanian, Vivek Thangavelu, Natasha Sihota, Thomas Hoelen, Aaron M. Johnson, Gregory V. Lowry “Path to Autonomous Soil Sampling and Analysis by Ground-based Robots.” Journal of Environmental Managements.
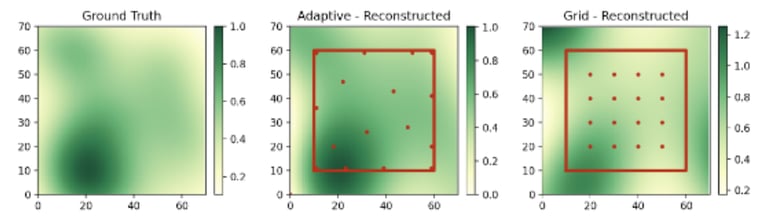
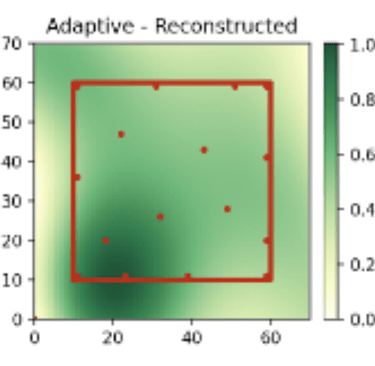
Adaptive Sampling Algorithm
The algorithm is developed to be a more efficient way of taking samples in an unknown environment. The algorithm is implemented in Python with scikit-learn machine learning library. The performance of the adaptive sampling algorithm is compared with the Boustrophedon algorithm and the performance graphs are generated with MATLAB python library. To ensure the fairness of comparison, both adaptive and Boustrophedon algorithms use the same underlying Gaussian Process settings. To compare the accuracy of the reconstruction, the Wasserstein distance is used. The Wasserstein distance is also known as Earth Mover's Distance (EMD)