Project
Inverted Pendulum - Torsobot
Collaborators: Kaibiao Ruan
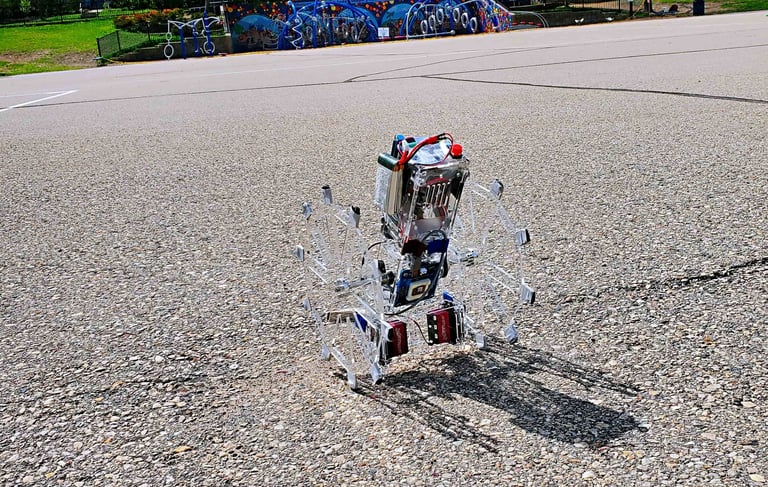
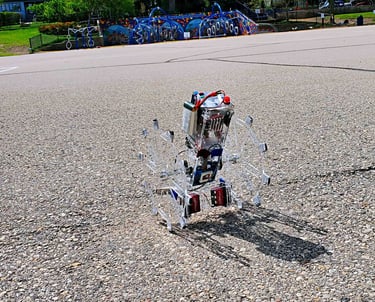
Torsobot V2
The V2 version of Torsobot was the discrete wheeled platform I developed mainly to study different walking gait at The Biomechatronics, Assistive Devices, Gait Engineering, and Rehabilitation Laboratory at the University of Wisconsin–Madison.
The system is equipped with
Raspberry Pi 3B for computation
Arduino Nano for sampling the encoder
IMU sensor for pose estimation
DC motor for main actuation
Servo motor for active kicker mechanism (not pictured)
Here is our lab video that featured the robot I developed:

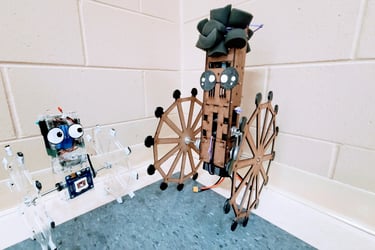
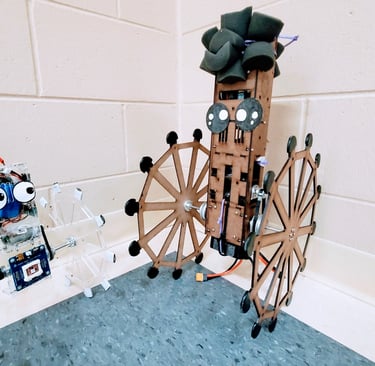
Torsobot V1
This platform was the initial torso bot that I worked on. The initial platform was a proof of concept but had issues such as out-of-sync data streams. Many of these problems were improved in the V2 version.
You can read more about the project here: https://uwbadgerlab.engr.wisc.edu/research/